
 Magician Chasis With XBee
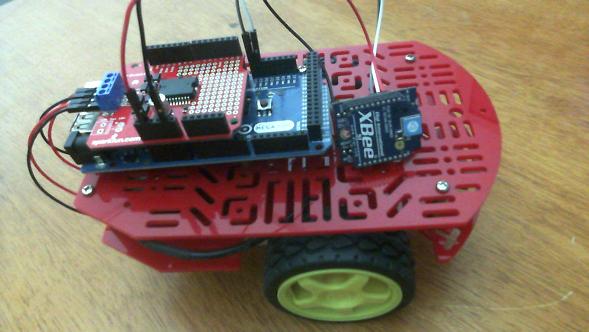
Magician Chasis With XBeeYou don’t have to own an expensive robot to do cool stuff, all you have to do is make the most you can out of what you have. In this tutorial I will use the popular, yet affordable, Magician Chasis robot and make a wireless controller for it using XBee and LabVIEW.
The Result: How The Robot Works Like
More than likely you want to see a video of this beauty before you even try to run the code right? then here it is.
Circuit Connections
We have a transmitting XBee and a receiving one. The transmitting XBee is just connected to a USB port in my laptop.
The receiving XBee is connected to the Arduino with this pin connections respectively:
- VSS->GND
- VCC->3.3V
- DOUT->RX
- DIN->TX
LabVIEW Interface VI: MagicianChasisRobotControl.vi
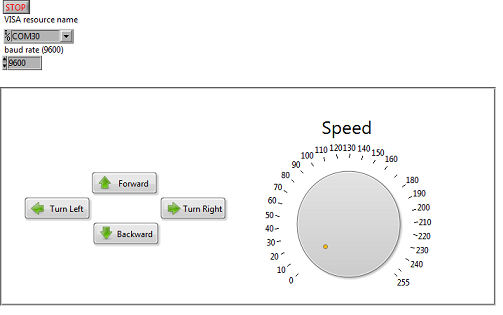 The robot’s LabVIEW controller
The robot’s LabVIEW controllerYou can download the robot interface LabVIEW VI from here.
The control consists of five inputs, four of which are the directions (left, right, forward, back) and the last one is the speed. The directions are booleans (0 or 1) and the speed is numeric and goes from 0 to 255, the latter controls the 8 bit ( 2^8-1 = 255 ) PWM wave from the Arduino.
You also have to set up the XBee serial communication parameters: what COM port your XBee is connected to and what speed. Make sure you click refresh from the drop down menu in the interface when you connect the XBee, otherwise the port might not appear listed.
The communication and controller interpretation is pretty simple: all I do is send of comma separated values that end with a semi colon, these commands are send in the order “left,right,forward,backward,speed;”
If the left button is being pressed, and the speed is halfway, then the values of the list is “1,0,0,0,125;”
Arduino Sketch: MagicianChasisRobotControl.pde
I used the Arduino Mega for this project. If you are using the Arduino Uno or an Arduino that has only one serial port set of RX and TX pins, replace Serial3 with just Serial, also disconnect the XBee while you are uploading the code. Alternatively you can use the SoftwareSerial library to create RX and TX pins in pins other than 0 and 1, this way you will be able to use the built in serial to debug your code.
#define BACKWARD LOW
#define FORWARD HIGH
#define MOVEFORWARD 1
#define MOVEBACKWARD 2
#define TURNLEFT 3
#define TURNRIGHT 4
char labViewData[100]={};
int labViewDataLength=0,commaCount=0;
int rtdp = 12, ltdp = 13, rtsp = 3, ltsp = 11; // rtdp=RrightTireDirectionPin, ltsp=LeftTireSpeedPin (infer the others)
int lastAction=0;
String left_s="",right_s="",forward_s="",backward_s="",speed_s="";
int left,right,forward,backward,speed;
void setup(){
// set pin modes
pinMode(rtdp,OUTPUT);
pinMode(ltdp,OUTPUT);
pinMode(rtsp,OUTPUT);
pinMode(ltsp,OUTPUT);
stop();
Serial3.begin(9600);
// Serial.begin(9600); // uncomment to debug code on (mega only)
}
void loop(){
if(Serial3.available()){
// LabVIEW program sent command
labViewDataLength=Serial3.readBytesUntil(';',labViewData,50); // read the command LabVIEW sent
for(int i=0;i<labViewDataLength;i++){
// separate data
if(labViewData[i]==','){
// increase comma count
commaCount++;
}
if(commaCount==0 && labViewData[i]!=','){
// read left
left_s=left_s+labViewData[i];
}else if(commaCount==1 && labViewData[i]!=','){
// read right
right_s=right_s+labViewData[i];
}else if(commaCount==2 && labViewData[i]!=','){
// read forward
forward_s=forward_s+labViewData[i];
}else if(commaCount==3 && labViewData[i]!=','){
// read backward
backward_s=backward_s+labViewData[i];
}else if(commaCount==4 && labViewData[i]!=','){
// read speed
speed_s=speed_s+labViewData[i];
}
}
// change data from strings to integers
left=(int)left_s.toFloat();
right=(int)right_s.toFloat();
forward=(int)forward_s.toFloat();
backward=(int)backward_s.toFloat();
speed=(int)speed_s.toFloat();
// code debugging (mega only)
/* Serial.print("Left: ");
Serial.println(left,DEC);
Serial.print("Right: ");
Serial.println(right,DEC);
Serial.print("Forward: ");
Serial.println(forward,DEC);
Serial.print("Backward: ");
Serial.println(backward,DEC);
Serial.print("Speed: ");
Serial.println(speed,DEC);*/
}
// control wheels
control(left,right,forward,backward,speed);
// reset variables
commaCount=0;
left_s="";
right_s="";
forward_s="";
backward_s="";
speed_s="";
}
void control(int leftParam, int rightParam, int forwardParam, int backwardParam, int speedParam){
if(leftParam){
turnLeft(speedParam);
}else if(rightParam){
turnRight(speedParam);
}else if(forwardParam){
moveForward(speedParam);
}else if(backwardParam){
moveBackward(speedParam);
}else{
switch(lastAction){
case MOVEFORWARD:
analogWrite(ltsp,speedParam);
analogWrite(rtsp,speedParam);
break;
case MOVEBACKWARD:
analogWrite(ltsp,speedParam);
analogWrite(rtsp,speedParam);
break;
case TURNLEFT:
analogWrite(rtsp,0);
analogWrite(ltsp,speedParam);
break;
case TURNRIGHT:
analogWrite(ltsp,0);
analogWrite(rtsp,speedParam);
break;
default:
// do nothing
//stop();
break;
}
}
}
void turnRight(int speedParam){
digitalWrite(rtdp,BACKWARD);
analogWrite(ltsp,0);
analogWrite(rtsp,speedParam);
lastAction=TURNRIGHT;
}
void turnLeft(int speedParam){
digitalWrite(ltdp,BACKWARD);
analogWrite(rtsp,0);
analogWrite(ltsp,speedParam);
lastAction=TURNLEFT;
}
void moveForward(int speedParam){
digitalWrite(ltdp,FORWARD);
digitalWrite(rtdp,FORWARD);
analogWrite(ltsp,speedParam);
analogWrite(rtsp,speedParam);
lastAction=MOVEFORWARD;
}
void moveBackward(int speedParam){
digitalWrite(ltdp,BACKWARD);
digitalWrite(rtdp,BACKWARD);
analogWrite(ltsp,speedParam);
analogWrite(rtsp,speedParam);
lastAction=MOVEBACKWARD;
}
void stop(){
analogWrite(ltsp,0);
analogWrite(rtsp,0);
}